
I had a busy EVA and robotics day!
I got to capture Cygnus with the robotic arm for the first time today. As you might know, this is a new cargo resupply vehicle that will fly to Station for the first time probably next month. No big changes from the many HTV captures I’ve practiced so far, but a bit of a change of perspective: the grapple fixture is right next to the main engine nozzle! It’s a bit strange to be looking through the arm camera straight into an engine’s “business end”, but of course engine firing will be inhibited at that point.
Then I had a preparatory class for Thursday EVA training in the Neutral Buoyancy Facility (see L-479: Logbook). We’ll be practicing the replacement of an Interface Heat Exchanger on the Lab. In the picture you can see our worksite: we’ll actually have to remove a couple of Lab panels to gain access to the component. It’s a really tight place in the big suits, especially because, since this picture was taken, the PMM (Permanent Multipurpose Module) has been attached to the free CBM on Node1. The CBM is the Common Berthing Mechanism and you can see it in the picture as well: it’s the circle with the four petals.
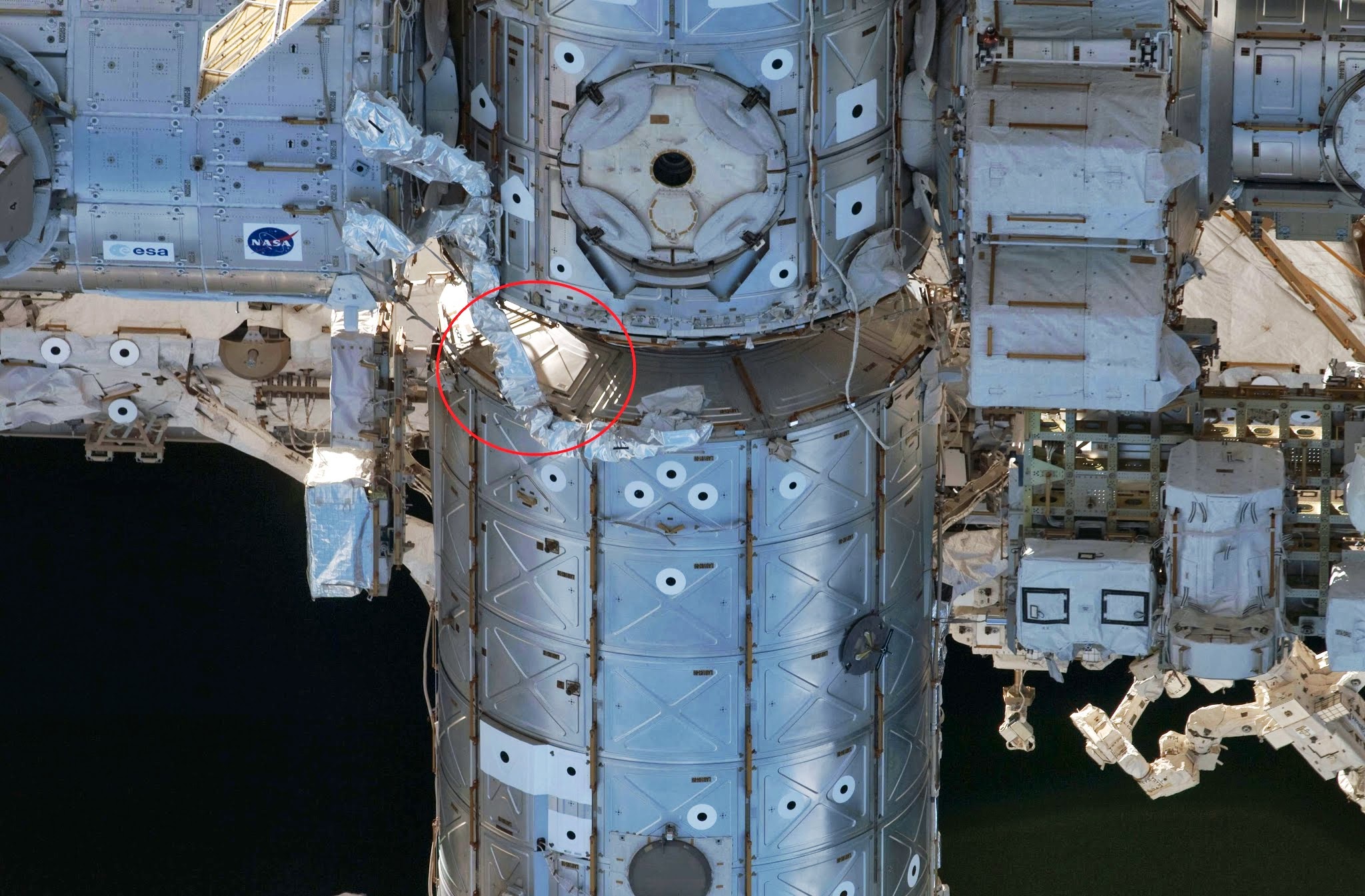
Station exterior. Credits: NASA
20/08/2013