
Yesterday we had quite a special training event in the Virtual Reality lab. Terry, Butch, Anton and I all joined in practicing one of the complex choreographies in which we use the robotic arm in support of a spacewalk.
In our scenario, Butch and Terry were initially the spacewalkers, which in the virtual reality lab means that they were wearing the glasses and the gloves and they were moving in the virtual Space Station scenario and interacting with it.
I was the robotic operator, and I could actually observe their virtual movement on my camera views. Anton was there to help mainly with camera panning, tilting and zooming, a role we call the Robotic Workstation Assistant.
In our scenario, we were dealing with a failed pump module, which had already been removed in a previous EVA and was temporarily stowed on the POA – this is like a robotic end-effector, but it’s on a fixed position on Station. We are able to install a grapple fixture on a pump module so that the POA can attach to it.
First I took GCA instructions from Butch to maneuver the arm to a position where he could ingress the foot restraint which, in our simulation, was already attached to robotic end-effector. Check this older logbook if you don’t know what GCA is.
Then I maneuvered him to the POA. Once Butch was in a position to get hold of the pump module handrails, we released the unit from the POA and I programmed an automatic sequence to get him to an external stowage platform, the final stowage location of the failed unit.
At that point we swapped positions: Terry got in the arm, virtually holding the pump module, and I became EV2, assisting in monitoring clearances and providing GCA instructions to insert the pump module in the guidance rails of its stowage “box” .
Virtual Reality lab is especially useful to practice coordination and communication, which are key to successful and smooth EVA/robotics combined operations. Moreover, the virtual reality environment provides a realistic reproduction of the lighting condition. At night, it can be very challenging to have a good view of the entire robotic arm and all the clearances!
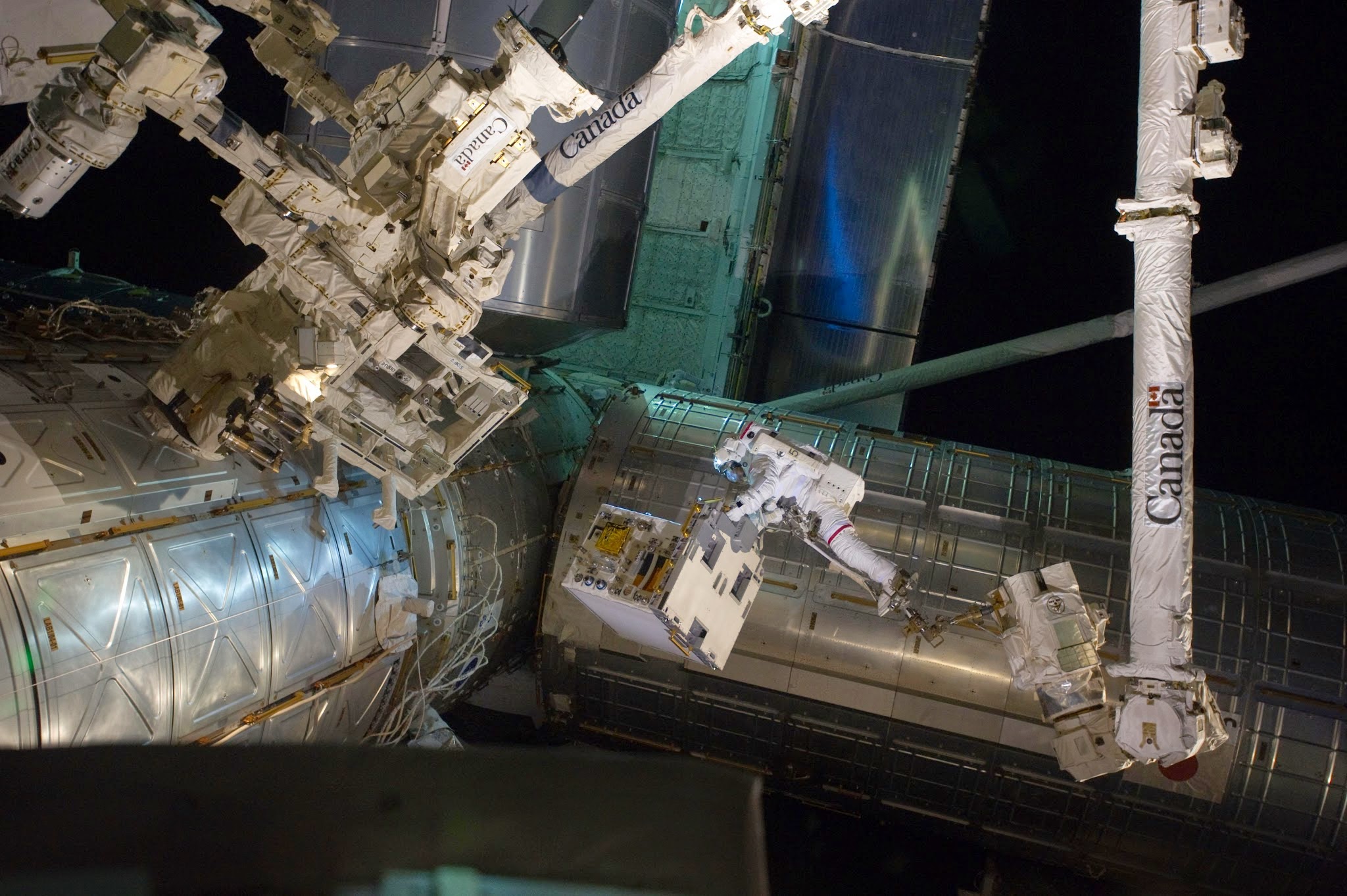
Picture: an EVA crewmember handling a pump module in space a few years ago. Just like on our scenario, he’s attached at the end of the arm.
Futura mission website (Italian): Avamposto42
avamposto42.esa.int
(Trad IT) Traduzione in italiano a cura di +AstronautiNEWS qui:
https://www.astronautinews.it/tag/logbook/
(Trad ES) Tradducción en español aquí:
https://www.intervidia.com/category/bitacora/
(Trad FR) Traduction en français par +Anne G ici:
https://spacetux.org/cpamoa/category/traductions/logbook-samantha/
01/07/2014