Floating ahead…
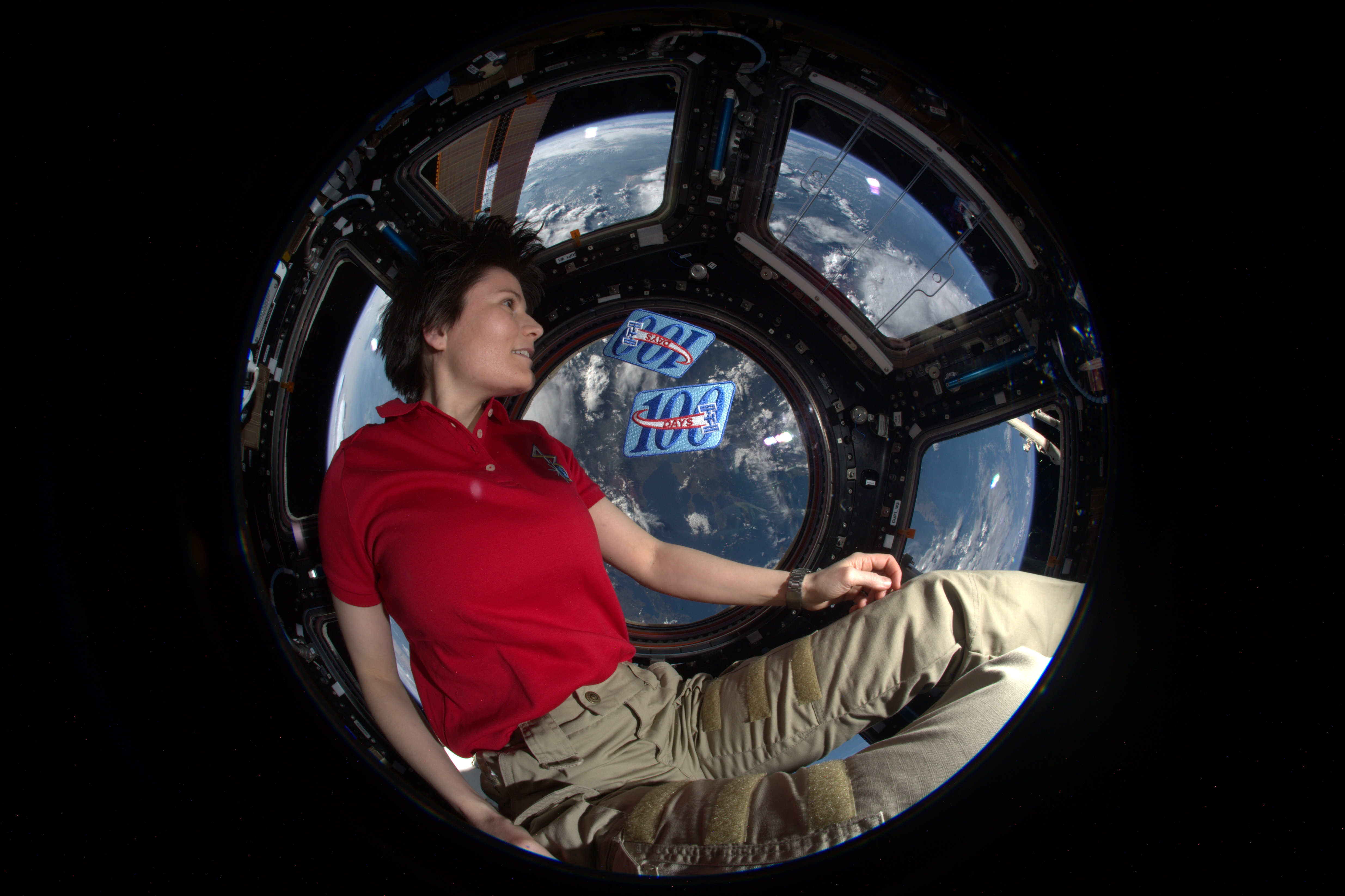
Wow, a world record! Congratulations, Samantha! An Italian woman is now the record holder for the “longest female presence in space”! Even longer than any cosmonaut, and the Russians have a history of long space missions! She is also longer than the previous record holder Suni Williams, who has stayed 195 days in space on a single mission… Now Samantha is “one step ahead”!
 This event was reason enough for our Ground Controller David Hagenstroem to draw a memorable comic. Of course we wanted Samantha to know that we are aware of her new ‘power’ – that is why we wanted to bring her the comic on the Space Station.
Should not be a big problem, right? Well, “In principle, no”. But a space station is, even in our times of ubiquitous Internet a special place, for space enthusiasts at least. I still remember when a NASA colleague asked me if I wanted to send an image to the Space Shuttle computer while I was getting ‘On The Job Training’ in Houston, USA. You bet!! It was a simple key-press in reality but for space enthusiasts like me it was the most amazing thing in the world. In the following weeks I got on everyone’s nerves recounting my story over and over…
This event was reason enough for our Ground Controller David Hagenstroem to draw a memorable comic. Of course we wanted Samantha to know that we are aware of her new ‘power’ – that is why we wanted to bring her the comic on the Space Station.
Should not be a big problem, right? Well, “In principle, no”. But a space station is, even in our times of ubiquitous Internet a special place, for space enthusiasts at least. I still remember when a NASA colleague asked me if I wanted to send an image to the Space Shuttle computer while I was getting ‘On The Job Training’ in Houston, USA. You bet!! It was a simple key-press in reality but for space enthusiasts like me it was the most amazing thing in the world. In the following weeks I got on everyone’s nerves recounting my story over and over…
 Back to the comic: In principle, astronauts can receive emails on the Station. But for your email to actually arrive in their inbox, you need to be on a special list that the astronauts manage themselves. Working at a control center we could of course use this communication channel, but we chose another way.
Every day the crew receives a “daily summary” that is prepared on ground and radioed up. This document includes comments on the day’s schedule, various Space Station parameters and a question-and-answer section. We sometimes add a caricature, a riddle or another bit of fun to make our colleagues in space start the day with a smile.
Astronauts are encouraged to study the Daily Summary in the morning so that any questions or comments they have can be asked during the daily planning conference.
We placed the comic in the Daily Summary and added a few notes. Pretty soon we heard Samantha’s friendly voice during the Daily Planning Conference saying she was pleased about it …
Now I am afraid that I must go seriously talk to David and warn him that he will not make many friends, if he is permanently talking about how he once sent a drawing to space …
Back to the comic: In principle, astronauts can receive emails on the Station. But for your email to actually arrive in their inbox, you need to be on a special list that the astronauts manage themselves. Working at a control center we could of course use this communication channel, but we chose another way.
Every day the crew receives a “daily summary” that is prepared on ground and radioed up. This document includes comments on the day’s schedule, various Space Station parameters and a question-and-answer section. We sometimes add a caricature, a riddle or another bit of fun to make our colleagues in space start the day with a smile.
Astronauts are encouraged to study the Daily Summary in the morning so that any questions or comments they have can be asked during the daily planning conference.
We placed the comic in the Daily Summary and added a few notes. Pretty soon we heard Samantha’s friendly voice during the Daily Planning Conference saying she was pleased about it …
Now I am afraid that I must go seriously talk to David and warn him that he will not make many friends, if he is permanently talking about how he once sent a drawing to space …

Servus Samantha, the comic for you is finished. Credits: DLR
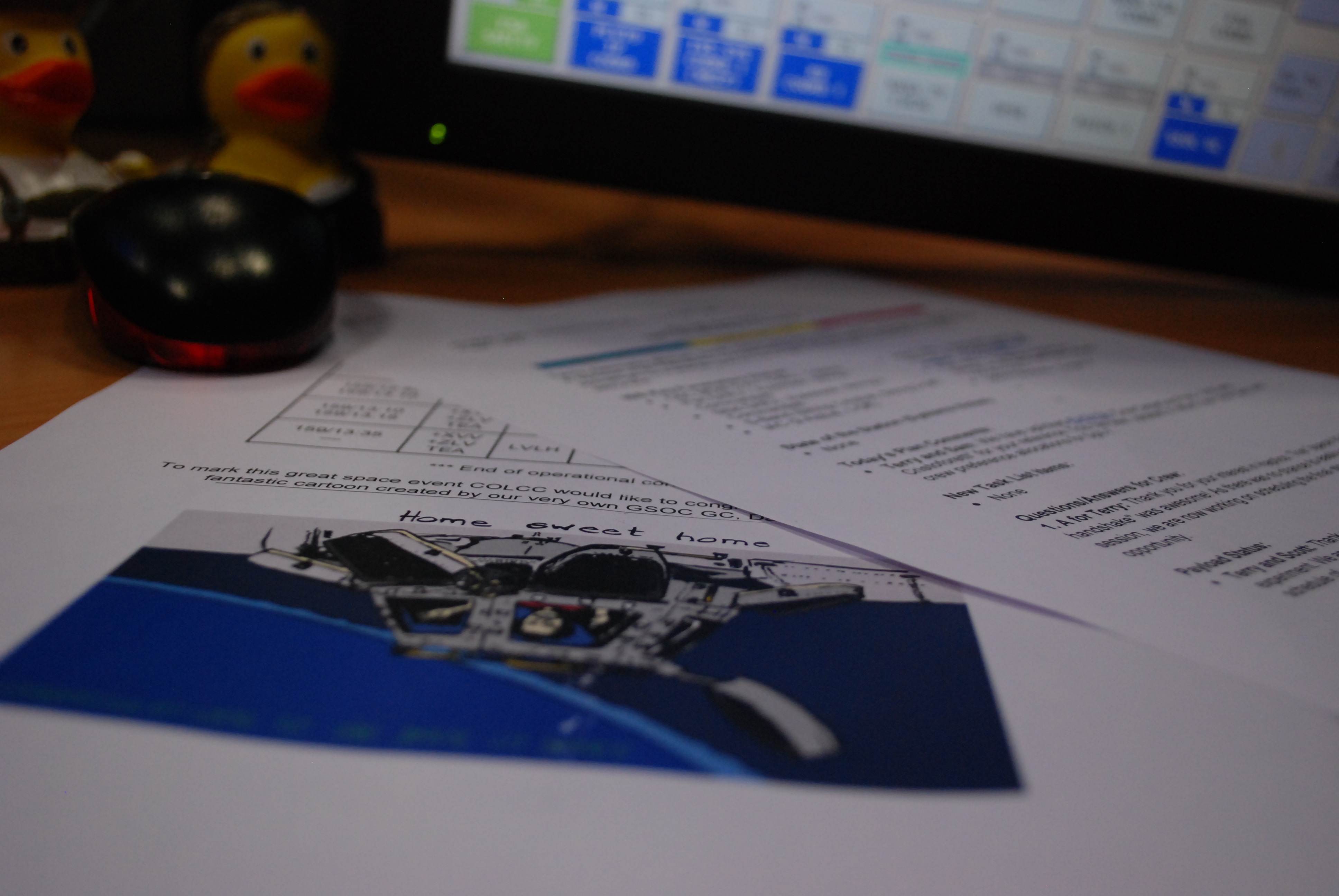
The Daily Summary on Monday with David’s comic. Credits: DLR
12/06/2015